Projekty a SOČky
Na této stránce je přehled témat SOČ* pro rok 2017/2018, která vám nabízíme.
Témata jsou obecného rázu a zaměřují se vesměs na vývoj technického zařízení se vším všudy, což obnáší vývoj zpravidla elektroniky, mechanické konstrukce a softwaru. To však neznamená, že v rámci SOČ je třeba zpracovat všechny aspekty. Témata můžeme dělit i mezi více řešitelů, kteří spolupracují na jednom výsledném zařízení. Zároveň lze většinou témata použít jako dlouhodobé nebo maturitní práce Pokud vás nějaké téma zaujalo, máte k němu otázky, návrhy na rozšíření či dokonce vlastní téma, neváhej nás kontaktovat na soc@robotikabrno.cz nebo se za námi přijďte podívat na Robotárnu.
Pět našich SOČek dostalo letos finanční podporu od organizace JCMM (Jihomoravské centrum pro mezinárodní mobilitu) v rámci projektu Podpora SOČ. Všechny tyto témata mají již řešitele. Ostatní témata jsou bez finanční podpory, ale i přesto se ně můžete k nám přihlásit a my vám pomůžeme s realizací. Pokud byste měli o některé téma zájem, kontaktujte nás na soc@robotikabrno.cz. My se vám brzy ozvem.
*SOČ je středoškolská odborná činnost a jedná se o největší multioborovou soutěž pro středoškoláky. Má 18 kategorií (od matematiky, fyziky, přes biologii a geologii až po strojírenství, elektroniku a informatiku). Cílem je v rámci daného projektu provést výzkum a na základě výsledku sepsat "odborný" text, který se následně odprezentuje na školním, okresním, krajském a případně i celostátním kole z kterého se lze dostat i na zahraniční soutěže (např. Intel ISEF).
Více informací o SOČ můžete najít na webu www.soc.cz nebo www.sockari.cz.
Proč dělat SOČ:
- nové zkušenosti a znalosti i známosti
- aplikace znalostí do praxe
- možnost přijetí na vysokou bez přijímaček
- lze postoupit i do zahraničí (Intel ISEF).
- vítězové celostátních kol z JMK získávají stipendium 30 000 Kč ročně z programu PPNS
Naše nejúspěšnější projekty můžete najít zde.
Seznam témat:
Grantová témata 2017-2018 (podpořená JCMM - přihlašování ukončeno):
GoTrack – fitness tracker pro horolezce
Automatický systém pro úpravy vlastností kapalin
Chytré ovládání osvětlení pro domácnost a malou kancelář
Tavná pistole v2.0
Tuning obráběcího stroje
Grantová témata 2016-2017 (podpořená JCMM - přihlašování ukončeno):
Systém pro sledování pohybu robota v aréně (obsazeno)
Inteligentní nárazník
Vyčítání hodnot z elektroměru/vodoměru/plynoměru (obsazeno) (informace k projektu)
Rozšiřující platforma/nástavba pro robota Pololu 3pi (obsazeno) (informace k projektu)
Negrantová témata (přihlašování ukončeno - v případě zájmu nás kontaktujte na soc@robotikabrno.cz):
Stroj na Rubikovu kostku
Měření výšky hladiny ve studni
Maketa světelného meče (obsazeno)
Platforma pro hromadnou komunikaci robotů (obsazeno)
Elektrická dvoukolová rikša
Tempomat pro cyklistu
Přímý osvit fotocitlivých materiálů
Slicer pro 3D tiskárnu
Nástroj na skriptové generování písemek
Stabilizační systém pro dvoukolového robota (obsazeno)
Bezpilotní letadlo pro sběr aeroplanktonu
Návrh CNC obráběcího stroje a 3D tiskárny v jednom
Lidar
Naše témata:
Systém pro sledování pohybu robota v aréně
Při vývoji robotů pohybujících se samovolně prostorem je nezbytností analyzovat jejich pohyb. Tuto analýzu je možné provádět pouhým pozorováním, v robotické hantýrce tzv. "okoskopicky". U rychle se pohybujících robotů však okoskopická analýza přestává stačit - není dostatečně rychlá, přesná a postrádá archivační funkcionalitu. Okoskopickou analýzu je možné podpořit videozáznamem, ze kterého se však špatně odečítají přesné hodnoty.
Rádi bychom postavili zařízení, které by za pomoci kamery snímající půdorys arény a speciálního sledovatelného majáčku umístěného na robotovi sledovalo jeho pohyb a analyzovalo jej (měří např. rychlost, zrychlení, orientaci apod.). Toto zařízení by následně naměřené výsledky prezentovalo ve strojově čitelném formátu a zároveň graficky znázorňovalo ve skutečném prostředí (aréně) pomocí promítání DLP projektorem. Takto prezentované výsledky by výrazně usnadnily analýzu pohybu robota a zjednodušily tak odladění softwaru pro jeho pohyb.
Cílem práce by bylo toto zařízení navrhnout a realizovat.
Co práce obnáší:
- prozkoumání možných technik pro sledování polohy robota v 2D prostoru
- implementaci vybrané techniky (a případnou stavbu periferních zařízení - např. majáčků)
Stroj na Rubikovu kostku
Maketa světelného meče
Určitě všichni známe Hvězdné války. Světelný meč je úžasná zbraň. Problém je, že dnes moc světelných mečů není. Letos na Robotiádě (robotická soutěž v Brně) byl jedním z organizátorů rytíř, ale určitě mi dáte za pravdu, že na takové akci by byl lepší rytíř Jedi. Jenže rytíř Jedi s železným mečem z 16. století není nic moc. Proto by bylo pěkné mu vyrobit světelný meč.
Cílem práce je navrhnout maketu meče, použitelnou na LARP[1], imitující světelný meč. Imitace má zahrnovat světelné efekty (minimálně vysouvání za zasouvání meče) s nastavitelnou barvou, případně audio efekty (reagující na pohyb mečem). Předpokládá se odolnost proti nárazu.
Co práce obnáší:
- návrh osvětlení a řídicí elektroniky
- zabudování elektroniky do makety meče (s ohledem na odolnost při simulovaném boji)
- oživení elektroniky a naprogramování efektů
Doporučené řešení:
- na dřevěné jádro nalepit LED pásky a strčit to do průhledné gumové hadice (nejlépe difúzní)
- do oblasti záštity/jílce schovat baterie a řídicí elektroniku (může být univerzální procesorová deska stylem Arduino).
- oživit a naprogramovat
[1] Live Action Role Play – hry na hrdiny naživo (viz Wikipedie)
Lidar
Pohyb robotů v neznámém a reálném prostředí je jednou z nejtěžších disciplín. Spočívá především ve vhodné volbě kombinace senzorů, které dostatečně přesně a jednoduše zkoumají okolí, a následně získání užitečné a abstraktnější informace z naměřených dat.
Zpravidla se aplikují dva přístupy. Jedním je použití specializovaných senzorů, které měří např. vzdálenost, barvu apod. Druhým přístupem je použití kamery a rozpoznávání obrazu. Rozpoznávání obrazu je výpočetně náročné a obecně velmi komplikované, jakmile se však podaří, poskytuje cenné informace. Naopak použití dat ze specializovaných senzorů je jednoduché na zpracování, ale často poskytují pouze strohé a jednoúčelové informace
Lidar je senzor, který leží na pomezí těchto přístupů. Zpravidla pomocí laserového paprsku měří vzdálenost překážek okolo sebe a poskytuje jednorozměrnou mapu vzdáleností překážek v zadaném úhlovém kroku. Data z toho senzoru jsou dobře zpracovatelná, mají velkou vypovídací hodnotu a např. na rozdíl od kamery z nich lze snadno získat tu nejhodnotnější informaci - jak daleko a jak velká překážka se kde nachází.
Použití lidaru se neomezuje jen na robotiku. Dostatečně přesné lidary lze např. použít k 3D skenování objektů.
Existují hotová průmyslová řešení, která se však cenově pohybují vysoce nad možnostmi hobby použití. Je však možné dohledat prezentace výsledků projektů, které demonstrují funkční Lidar s cenou přijatelnou pro hobby použití. Tyto projekty jsou však špatně nebo vůbec zdokumentované a rozhodně nejsou návodem pro stavbu.
Cílem tohoto projektu je prozkoumat možnosti měření vzdálenosti vhodné pro lidar a pokusit se sestavit prototyp lidaru s ohledem na rozumnou cenu.
Co práce obnáší:
- prozkoumání možností bezkontaktního měření vzdáleností
- navrhnutí a realizace prototypu lidaru
Možná řešení:
- triangulační metoda: v podstatě pravoúhlý tojúhelník, kde po přeponě svítí laser, jedna odvěsna představuje vadálenost, kterou chci měřit a druhou odvěsu tvoří senzor, který měrí polohu dopadu odraženého laserového paprsku. Jako senzor lze použít buď lineární CCD snímač (jednoduchá komunikace: dovnitř posílám jedním pinem hodinový signál a na druhém měrím napětí, odpovídající intenzitě osvětlení jednotlivývh pixelů), nebo PSD dioda (výstupem je poměr porudů, viz https://en.wikipedia.org/wiki/Position_sensitive_device)
- metoda Time Of Flight (TOF) - metoda založená na měření doby letu světla od zdroje k překážce a zpět ke snímači. Na měření velmi krátkých časových intervalů existují speciální integrovné obvody, určené přímo pro tyto aplikace.
Měření výšky hladiny ve studni
Nevím, jestli jste si toho všimli, ale v posledních letech bývá v zimě čím dál míň sněhu. Na první pohled to vypadá pouze jako drobná nepříjemnost, komplikující život zejména lyžařům a podobným sportovním nadšencům. Ovšem značná část zásob spodních vod je obnovována právě ze sněhu při jarním tání. V našich zeměpisných šířkách zatím tento problém lidé zásobovaní z veřejných vodovodů příliš nepociťují. Ovšem lidé v menších vesnicích, či zahrádkářských a chatových koloniích, kteří berou vodu z vlastní studny, se již začínají s nedostatkem vody potýkat.
Aby se minimalizovaly dopady nízkého stavu vody ve studni na každodenní život a zefektivnilo její využívání, je potřeba stav vody ve studni měřit. Z naměřených dat za delší období (řádově několik let) by pak mohla vzniknout zajímavá statistika o stavu spodních vod v dané lokalitě.
Cílem práce je navrhnout zařízení, měřící aktuální výšku hladiny ve studni. Problém je třeba řešit zvlášť pro klasické kopané a vrtané studny. Aktuální stav by měl být přehledně zobrazován v místech významnějšího odběru vody (koupelna, kuchyň, venkovní přípojka na zalévání). Naměřená data je třeba archivovat a graficky zobrazovat v historii. (Může být samostatná práce.) Do budoucna se předpokládá napojení na systém zahradní automatizace.
Co práce obnáší:
- průzkum komerčně dostupných řešení
- výběr vhodného, případně návrh vlastního řešení se zaměřením na cenu
- implementace a testování
- přenos a zpracování dat v PC
Projekt není třeba řešit naráz jako celek, ale jde rozdělit do menších samostatných celků. Jednotlivé části jdou řešit buď postupně, nebo může na projektu pracovat více lidí, každý na své části, téměř nezávisle na ostatních.
Doporučené rozdělení projektu:
- měření výšky hladiny v kopané studni
- měření výšky hladiny ve vrtané studni
- návrh zobrazovací jednotky
- přenos a zpracování dat v PC
- začlenení do systému domácí automatizace
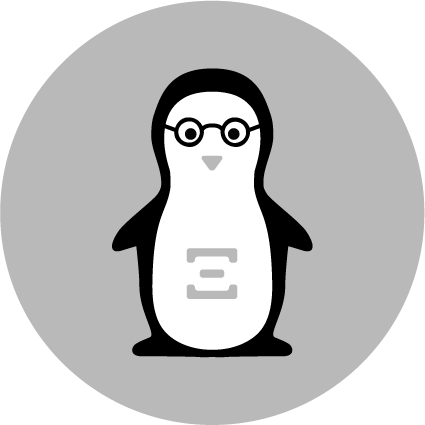
Platforma pro hromadnou komunikaci robotů
Multiagentní systémy jsou v poslední době čím dál tím více populární téma. Tyto systémy pro řešení zadaného úkolu nevyužívají jeden komplexní stroj se složitou rozhodovací logikou, ale místo něj využívají více nezávislých a často velmi jednoduchých strojů (agentů), které mezi sebou jednoduše komunikují. Tyto systémy jsou zpravidla inspirované přírodou - např. principy na jakých mravenci hledají cestu za potravou nebo jak hlenky formují kolonie.
Takové systémy mají často velmi velkou fault tolerance (selhání jedince neovlivní selhání systému, v nejhorším případě zhorší jeho vlastnosti), dobře škálují (přidáním agentů zrychlíme či zkvalitníme plnění úkolu) a jsou snadno za chodu opravitelné výměnou jednotlivých agentů. Díky těmto pozitivním vlastnostem je věnováno velké úsilí jejich výzkumu. Výzkum však zůstává především v teoretické rovině a problémy se počítačově modelují.
Rádi bychom přenesli poznatky z tohoto výzkumu do praxe - chtěli bychom mít fyzické roboty, kteří plní úkol ve skutečném světě. Zatímco postavit spoustu malých jednoduchých robotů není problém (a existují hotová řešení), tak neexistuje rozumná platforma, která by umožňovala jejich vzájemnou distribuovanou bezdrátovou komunikaci (do které je možné agenty vkládat/odebírat za chodu, je samo regulující a nemá centrální komunikační bod).
Cílem práce je takovouto platformu pro bezdrátovou komunikaci navrhnout a realizovat. Existuje široká škála bezdrátových modulů, které umožňují distribuovanou komunikaci. Je tedy třeba prozkoumat nabídku trhu, vybrat vhodné řešení a na něm postavit hardwarový modul s komunikačním frameworkem/knihovnou, který zprostředkuje jednoduché API pro uživatele, díky kterému bude moci jednoduše přijímat a posílat zprávy, zjišťovat přítomnost jedinců v rámci této sítě apod. Nad takovouto platformou lze potom některé známé algoritmy snadno implementovat a demonstrovat jejich funkčnost.
Tato práce by mohla přiblížit teoretický výzkum blíže praxi a demonstrovat jeho vlastnosti např. na netradičních způsobech řešení robotických soutěží, simulací robotů prozkoumávající nepřátelské území apod.
Co práce obnáší:
- prozkoumání možností komunikace
- návrh hardwarového modulu, který bude se zbytkem robota komunikovat jednoduchou standardizovanou linkou (UART, SPI apod.)
- tvorbu případného firmwaru pro modul a tvorbu knihovny
- implementaci demonstračního příkladu (zajímavý algoritmus)
Inteligentní nárazník
Základními stavebními prvky robotů jsou senzorický systém, řídicí systém a aktuátory. Většina robotických soutěží se zaměřuje na mobilní roboty. Pro mobilního robota jsou velmi důležité informace o jeho bezprostředním okolí – není přede mnou překážka? Mám po pravé straně mantinel? Nespadnu ze schodů, když zacouvám? Existují různé typy senzorů, poskytujících informace o okolí – od jednoduchých, jako je tlačítko, které se zmáčkne při nárazu do překážky, až po vysoce sofistikované, jako například lidar, který poskytuje vysoce komplexní informace o topografii okolí, ale velmi obtížně zpracovatelné.
Cílem práce je navrhnout senzor, představující kompromis mezi nepostačující informací z prostého tlačítka a příliš komplexní informaci z pokročilejších senzorů. Navrhovaný senzor musí poskytovat informaci o vzdálenosti od překážky v daném směru pro malé rozsahy (v řádech centimetrů). Předpokládá se kontaktní měření, čímž se eliminují problémy s odrazivostí povrchu překážky, zkreslení výsledků při měření pod jiným úhlem, než kolmo na překážku a vliv okolního prostředí na měření (rušení).
Co práce obnáší:
- návrh a konstrukce mechaniky taktilního senzoru
- návrh a konstrukce snímací a vyhodnocovací elektroniky
- připojení a otestování na mobilním robotu
Možné řešení:
Kus tyčky, přidělaný na ložisku, pružinkou přitlačovaný k jednomu dorazu. Při kontaktu s překážkou dojde k otočení tyčky. Toto otočení bude snímáno a vyhodnocováno (v nejjednodušší verzi potenciometrem, další možnosti jsou například magnetický enkodér [máme odzkoušené a hotové destičky s osazeným enkodérem], nebo indukční snímač polohy [k dispozici otestovaný vývojový kit]).
Vyčítání hodnot z elektroměru/vodoměru/plynoměru
Ceny energií stoupají a v rámci optimalizace nákladů by bylo vhodné mít představu o průběžné spotřebě domácnosti. Komu se ale chce pravidelně (jednou měsíčně, týdně, nebo dokonce denně?) chodit odečítat stav elektroměru? Nikomu. Problém je, že většina běžných elektroměrů nedisponuje rozhraním pro automatizovaný odečet. Ještě horší je situace u vodoměrů a plynoměrů – v této kategorii nejsou pro domácí použití žádné možnosti automatického odečtu spotřeby.
Cílem práce je navrhnout systém, který bude automaticky odečítat stav daného měřidla. Odečítací zařízení musí být možno nainstalovat bez zásahu do konvenčního měřidla. Dále se předpokládá odesílání a zpracování dat do PC a zobrazování výsledků v uživatelsky přívětivé podobě.
Co práce obnáší:
- seznámení se s běžným způsobem zobrazování spotřeby elektroměrů/vodoměrů/plynoměrů
- návrh a otestování čtecího zařízení
- přenos a zpracování dat v PC
Možné řešení:
Využití senzoru z optické myši jako jednoduché kamery, s jejíž pomocí se bude snímat pohyb posledního ukazatele (toho nejrychlejšího). Se senzorem se komunikuje pomocí jednoduchého sériového rozhraní.
Elektrická dvoukolová rikša
Přepravu nákladů řeší lidé už od nepaměti. A ačkoliv již za tu dobu bylo vymyšleno mnoho nových způsobů jak věci přepravovat i dnes je stále co vylepšovat.
Pro osobní přepravu věcí a vybavení například na zahradu nebo do lesa nemáme ani dnes mnoho možností. Můžeme použít běžná kolečka nebo motorizované malotraktory, ale kolečka se nedají použít na delší vzdálenosti a větší hmotnosti a naopak malotraktorem neprojedete náročnější terén a jedná se již o dražší zařízení.
Jako použitelné řešení by mohla být elektrická rikša nebo dvoukolák, která se zdá jako rozumný kompromis mezi kolečky a malotraktorem. Na rozdíl od koleček je uživatel ušetřen od zvedání nákladu a jeho tlačení stejně jako u traktoru avšak při zachování manévrovatelnosti koleček nebo dvoukoláku.
Co práce obnáší:
- navrhnout a odzkoušet úpravu konstrukce dvoukoláku, tak aby umožňoval elektrické řízení
Tempomat pro cyklistu
Nejste-li totální peciválové a počítačoví povaleči, určitě se vám to už někdy stalo. Vyrazili jste si s někým (třeba s přítelkyní) na výlet na kole a ujeli mu (nebo ona vám?). Nejjednodušší řešení je nechat toho slabšího jet první. Jenže ten první se nejvíc nadře (alespoň se mu to tak zdá), protože za někým se jede vždycky líp (myslím pohodové výlety po cyklostezkách, ne nějaké brutální sjezdy a podobně). Co tedy s tím? Řešením by mohlo být, kdyby ten vepředu měl aktuální informace o tom, jak to tomu vzadu šlape, bez toho, aby se musel neustále ohlížet.
Cílem práce je tedy navrhnout systém, pravděpodobně složený ze dvou modulů, kdy jeden bude zobrazovat aktuální vzdálenost od druhého (případně další parametry). Měření vzdálenosti a přenos informací musí být bezkontaktní.
Co práce obnáší:
- bezkontaktní měření vzdálenosti v řádech desítek až stovek metrů
- bezdrátová komunikace na střední vzdálenosti (opět desítky až stovky metrů)
- konstrukce jednoduchého zobrazovacího modulu, který lze předělat na řidítka bicyklu
Možné řešení:
V obou modulech se budou nacházet baterie, RF modul (například Bluetooth) a GPS přijímač. V hlavním modulu pak navíc displej a řídicí mikroprocesor. Komunikace s GPS probíhá pomocí jednoduchého sériového rozhraní a textového protokolu (stejně tak s většinou RF modulů). Vzdálenost modulů se spočítá z rozdílu souřadnic z GPS v jednotlivých modulech. Jako zobrazovací modul lze případně použít chytrý telefon.
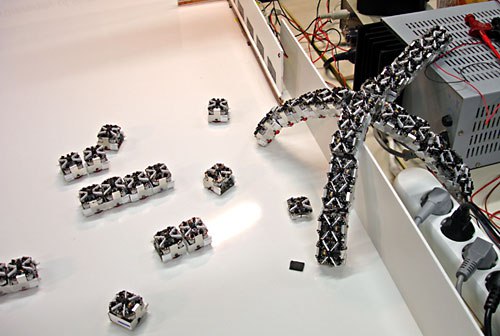
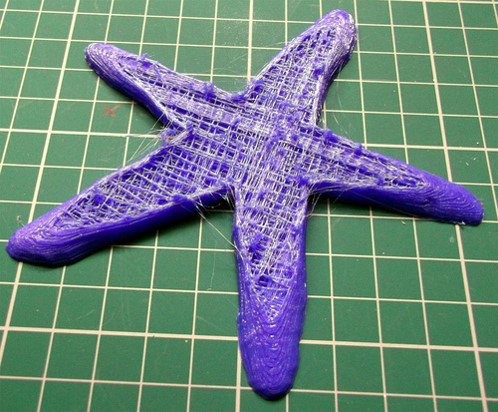
LEGO a 3D tisk
LEGO, a zejména LEGO Technic, obsahuje spoustu různých dílků. Dle našich zkušeností při stavbě robotů z LEGA v kroužcích nám však vždy chybí přesně ten dílek, který se nachází v jiné stavebnici anebo se vůbec nevyrábí. Mnoho složitějších konstrukcí by bylo možné dokonce výrazně zjednodušit a přitom zpevnit, vyztužit a mechanicky provést lépe (např. přidáním uhlíku). V dnešní době 3D tisku a kompozitních materiálů je již možné takové díly vyrábět podle požadavků dané aplikace.
Rádi bychom proto chtěli takovéto dílky navrhnout, vyrobit (například na 3D tiskárně) a porovnat jejich kvalitu a vlastnosti ve srovnání s originálními LEGO dílky.
Zároveň je možné v rámci práce zkoumat kvalitu 3D tisku (pružnost, pevnost, křehkost) s různými materiály (PLA, ABS) a případně s možností vylepšení/zpevnění vytisknutých modelů za pomoci dalších materiálů (překližka, uhlík).
Co práce obnáší:
- návrh nových LEGO dílků v CAD programu (SolidWorks, AutoCAD)
- otestování navrhnutých dílků a porovnání s původními LEGO dílky
- navrhnutí a otestování konstrukčních vyztužení pro již zhotovené dílky
- (volitelně/samostatně) testování 3D tištěných materiálů v kombinaci s dalšími materiály
Návrh CNC obráběcího stroje a 3D tiskárny v jednom
Cílem této práce je vytvořit CAD návrh prototypu minimálně ve třech osách řízeného CNC stroje na třískové obrábění s případnou možností současného použití s 3D tiskovou hlavou.
Návrh:
Základem stroje by měl být pevný stůl pro upínání obrobku nebo tištěného modelu.
Typy návrhu konstrukce mohou být koncipovány jako svařenec nebo výrobek z polymerbetonu, případně i jiná technologie.
Stroj by měl mít rozměry přibližně 100 x 50 cm (rozměry standardního kancelářského stolu).
Stroj musí být navrhnut tak, aby jej bylo možno vyrobit prakticky v domácích podmínkách bez potřeby ’’velkého strojního vybavení’’.
Požadavky na studenta:
- dobrá znalost nějaké CAD aplikace (SolidWorks, AutoCAD)
- základy strojírenství
- vhodné zkušenosti s obráběním
Co můžeme nabídnout:
- znalosti a zkušenosti v oblasti návrh strojních součástek v SolidWorksu
- zkušenosti s obráběcími systémy
Přímý osvit fotocitlivých materiálů
Při návrhu elektronického zařízení je zpravidla potřeba vyrobit několik jednotek až desítek prototypů desek plošných spojů. Zpravidla se tyto prototypy nechávají vyrábět u specializovaných firem. Výroba takto zadaného prototypu trvá zpravidla několik dní (často také s výrazným příplatkem), což velmi zpomaluje vývojový proces. Prototypy jednodušších až středně složitých desek je možné vyrábět i doma a celý proces zabere zhruba 2 hodiny.
Kvalitu tohoto procesu ovlivňuje zejména příprava masky pro osvit fotocitlivého materiálu UV světlem. V současné době se masky zpravidla tisknou na klasických laserových tiskárnách, které mají pro složitější desky nedostatečnou přesnost, která navíc výrazně zvýšit už nelze. Proto nelze (resp. velmi složitě a nejistě) vyrábět prototypy složitých desek s moderními SMD součástkami ve velmi malých pouzdrech, které vyžadují rozestupy a šíře jednotlivých vodivých cest v řádech desetin milimetru.
Rádi bychom výrobu masek, nejslabší článek výrobního procesu, odbourali a nahradili jej zařízením, které bude osvětlovat fotocitlivý materiál přímo bez masky - ať už cíleným mířením laserového paprsku nebo např. úpravou DLP projektoru. Několik pokusů, které dokazují reálnost tohoto postupu jsme již provedli, avšak dále jsme je nerozváděli.
Takové zařízení by výrazně zjednodušilo a zpřesnilo výrobní proces, což by umožňovalo vyrábět v domácích podmínkách i prototypy velmi složitých desek, zrychlilo fázi vývoje a také snížilo náklady.
Co práce obnáší:
- prozkoumání možných technik, jak cíleně osvětlovat fotocitlivý materiál (nabízí se laser, DLP projektor apod.)
- realizace tohoto zařízení po mechanické a případně elektronické a softwarové stránce
- zhodnocení dosažených výsledků, případná vylepšení
Slicer pro 3D tiskárnu
3D tisk je den ode dne populárnější téma. V nedávné době tato disciplína provedla obrovský skok, avšak v posledním roce se postup zastavil. Technologie je to atraktivní, avšak stále si myslíme, že je to hračka, pomocí které lidi staví další hračky a pro serióznější použití (prototypování, kusová výroba) je tato technologie stále velmi nezralá.
Jednou z největších slabin současného tisku je dle nás úroveň tzv. slicerů - softwarů, který vezme na vstupu 3D model a vygeneruje rozvrstvený model s podpůrnými prvky a výplněmi, dle kterého je možné již tisknout. Exitující řešení plně nevyužívají potenciál tisku a jsou vzdálena realitě - nereflektují skutečné potřeby, jako je např. tisk tenkostěnných dílů, vyplňování ploch s ohledem na mechanické vlastnosti (různé typy šrafování mají rozdílnou pevnost a pružnost), apod. Existující nástroje jsou příliš automatizované a nedávají uživateli možnost volby různých tiskových strategií pro různé části modelu.
Cílem práce by bylo navrhnout nové strategie tisku, ověřit je v praxi a případně implementovat do existujícího/nového sliceru.
Co práce obnáší:
- seznámení se s problematikou 3D tisku
- zkoumání mechanických vlastností výrobků v závislosti na zvolené strategii tisku
- návrh nových strategií a jejich experimentální ověření
- implementace do použitelného nástroje
Nástroj na skriptové generování písemek
Představ si, že jsi učitel a chceš každému žákovi nabídnout unikátní písemku, ale tak aby všichni měli srovnatelně složité zadání a způsob řešení. Ovšem jak na to? Potřebuješ nástroj, který ti na základě tvého zadání tyto písemky vygeneruje.
Cílem této práce je navrhnout nástroj (nejlépe webový), ve kterém budou moci učitelé pomocí jednoduchého skriptovacího jazyka vytvářet písemky pro studenty. Nástroj by měl být schopen generovat jak ostré písemky v tisknutelném výstupu, tak i cvičné písemky zveřejněné na webu.
Co práce obnáší:
- navrhnout a vytvořit nástroj pro generování unikátních písemek pro každého studenta pomocí skriptu
Stabilizační systém pro dvoukolového robota
Pohyb robota v terénu mimo laboratorní stůl stále představuje zdroj mnoha problémů. Jednoduchou konstrukci získáme například rozdílným náhonem dvou kol na jedné ose.
Při používání tohoto způsobu řízení chceme eliminovat zbytečné houpání robota během rozjezdu nebo brždění. Při vyšších rychlostech nebo při prudším stoupání nesmíme dovolit převrácení nebo dokonce kutálení robota.
Cílem práce je navrhnout a vyrobit stabilizační systém, který umožní snadné řízení popsaného robota.
Požadavky na zájemce
- zkušenosti s programováním
- nemít strach z matematiky (rotace v prostoru, diskrétní matematika)
- znalost PID regulace výhodou
Návrh řešení
- využít technologie gimbal (akcelerometr a gyroskop)
- umožnit pouze spojitou změnu zrychlení a přitom reflektovat požadavek navigačního systému
Bezpilotní letadlo pro sběr aeroplanktonu
Aeroplankton jsou drobní živočichové, kteří se vznášejí nebo aktivně létají v atmosféře. Podobně jako v oceánu tito živočichové migrují a oblivňují tak blízké i vzdálené ekosystémy. O těchto vztazích bohužel máme velice málo informací.
S rozvojem bezpilotních letadel přichází nová metoda, která nám může poskytnout nové informace o této neprozkoumané oblasti ekologie. Bezpilotní stroj létá i v místech, kam se běžné letadlo nedostane, a neovlivňuje tolik okolní prostředí svým pohybem a vibracemi.
Cílem práce je navrhnout a zkonstruovat systém pro odchyt aeroplanktonu pomocí entomologické síťky. Systém musí umožňovat dálkově řízené zahájení a ukončení odchytu po příletu na požadované místo. Řešitel může využít již existující bezpilotní letadlo jako nosič odchytového systému.
Požadavky na zájemce
- návrh a konstrukce mechanických částí
- zájem o létání
Návrh řešení
- konstrukce dálkově řízeného mechanického uzávěru entomologické síťky
- upevnění síťky s uzávěrem na letadlo tak, aby zůstala zachována letuschopnost
Rozšiřující platforma/nástavba pro robota Pololu 3pi
Na trhu je celá řada robotů (robotických stavebnic), které lze zakoupit. Liší se výrazně schopnostmi a cenou. Robot Pololu 3pi, patří mezi levnější varianty a je určen hlavně pro jízdu po čáře (v této kategorii vyniká). Má ovšem potenciál i pro další robotické aktivity, ovšem je potřeba mu přidat další senzory a provést určitá vylepšení. To by bylo cílem této práce.
Cílem práce je návrh mechaniky i elektroniky na nástavbu pro robota Pololu 3pi, která by splňovala následující požadavky:
- ochránit robota před nárazem
- umožnit snadné přidání dalších senzorů (enkodéry pro motory, ultrazvuk) a mechanických prvků (servo)
- zajistit snímání pohybu kol, tak aby bylo možné zjistit ujetou vzdálenost
- přidat další mikrokontrolér pro obsluhu nových senzorů
- umožnit připojení 2-3 serv
- správa nabíjení NiMH baterií v robotovi
Požadavky na zájemce:
- znalost CAD systému (nejlépe SolidWorks, případně Autocad)
- základní znalosti elektroniky
- schopnost navrhnout jednoduchý plošný spoj v programu typu Eagle, KiCad, Altium
Návrh řešení:
- mechanická konstrukce navrhnutá v CADu a vytisknutá na 3D tiskárně
- elektronický plošný spoj (druhá paluba) zajistí veškerou požadovanou funkcionalitu
GoTrack – fitness tracker pro horolezce
Denně jsme obklopeni technologiemi. Současným trendem jsou chytré nositelnosti. Hodinky s malým počítačem uvnitř, náramek měřící srdeční aktivitu a krokoměr v jednom, proč ne? Našli si místo v běžném životě, především jako fitness trackery pro sportovní aktivity. Jmenujme například běhání a plavání. Jeden sport ale zůstává pořád opomenut, tím sportem je lezectví, jelikož lezce zajímají diametrálně odlišné parametry, které současné fitness trackery nejsou schopné měřit (ať už z důvodu hardwaru nebo softwaru). Jsou jimi například počet pádů, průměrná rychlost lezení, rychlost stoupání, tempo lezení, využití končetin (lezecký krok)... Cílem práce je vyvinout fitness tracker zaměřený na lezectví, který by byl schopen zaznamenat co největší množství z výše uvedených parametrů. Tracker by zároveň měl být integrovaný do již existujících elektronických lezeckých deníčků. Díky automatizovanému měření nemusí lezec některé údaje zadávat ručně a zároveň odpadne problém se subjektivním zkreslením dat, kdy lezec nedokáže objektivně zhodnotit svůj výkon. Vývoj bude zahrnovat výběr vhodných senzorů, návrh elektroniky a především programování softwaru zpracujícího naměřené údaje. Pro odesílání dat do lezeckého deníčku by tracker mohl využívat chytrý telefon s příslušnou aplikací. Během průzkumu požadavků projevilo několik lezeckých center zájem o takový produkt a jsou ochotna se během vývoje podílet na jeho testování.
Automatický systém pro úpravy vlastností kapalin
Existuje mnoho oblastí, které vyžadují použití kapaliny s danými vlastnostmi. Nejjednodušším příkladem je udržování kvality vody v akváriu, kde sledujeme teplotu, Ph, množství minerálů, apod. Se stejnou problematikou se můžeme setkat např. při pěstování roslin, výrobě piva, správě technických kapalin v průmyslu, ... Úkolem systému pro úpravu kapalin je udržet zadané parametry v požadovaných mezích. Cílem této práce je navrhnout a zkonstruovat spolehlivý a cenově dostupný systém cílený na malé objemy (do 1000 litrů). Zařízení by mělo umožňovat regulaci teploty, Ph, tvrdosti kapalin, případně přidávat do systému látky jako hnojiva, minerály aj. Systém by měl být samočinný a plně konfigurovatelný přes počítač nebo chytrý telefon.
Chytré ovládání osvětlení pro domácnost a malou kancelář
S potřebou ovládat osvětlení v místnosti se setkal jistě každý. Může jít o moment, kdy sedíte u televize a vypínač je daleko. Nebo se chystáte přednést prezentaci a rádi byste zhasli první řadu světel před plátnem. Což nejde, jelikož všechna světla jsou zapojená na jeden vypínač. V dnešní době lze tento problém elegantně vyřešit pomocí bezdrátových modulů, které budou umístěny v každém světle a umožní je spínat samostatně. Cílem práce je takovýto modul vyrobit a následně otestovat na modelu malého domu či kanceláře. Modul by měl být koncipován tak, aby dobře škáloval – aby bylo možné do existující instalace jednoduše přidat další světla, či snadno nakonfigurovat, který vypínač ovládá které světlo/a. Bonusem v řešení práce by byla možnost ovládat světla pomocí webové, či mobilní aplikace.
Požadavky:
- možnost spínat každé světlo samostatně
- výroba inteligentního ovladače/vypínače
- centrální řídící server s webovou stránkou na ovládání
- každý modul může ovládat alespoň 4 světla – ovládání světel pomocí chytrých zařízení
Tavná pistole v2.0
Tavná pistole je zařízení umožňující spojování různých materiálů. Její použití je relativně jednoduché a levné. Ovšem jsou tu některé problémy. Například se musí docela dlouho čekat, než se pistole nahřeje na určitou teplotu, aby byla schopná roztavit lepidlo. Když se chvíli nepoužívá, tak se začne přehřívat a lepidlo z ní vytéká ven, proto ji musíte vypojit ze zásuvky, ale po chvíli chcete opět lepit a pistole je opět studená a celé tohle kolečko vás akorát zdržuje od práce. Cílem práce je návrh a výroba tavné pistole s nastavitelnou a udržovanou teplotou a automatickým regulovatelným dávkováním lepidla s mechanickými a elektronickými vylepšeními pro pohodlnější manipulaci.
Co práce obnáší:
- Seznámení se s problematikou regulování teploty a její řešení
- Návrh a realizace automatického dávkování materiálu
- Řešení možnosti přidat nástavce pro přesné tvarování vytlačeného materiálu
- Návrh upnutí celé tavné pistole nebo lepených předmětů pro pozdější strojní manipulaci
Možné řešení:
- Úprava stávající komerčně dostupné pistole
- Kompletní návrh a realizace celé nové tavné pistole
Tuning obráběcího stroje
V dnešní době lze pořídit relativně levný obráběcí stroj pro hobby využití nebo drahé stroje pro průmysl. Bohužel neexistují produkty, které by nabízely kompromis – dostatečnou přesnost (tuhost) za přiměřenou cenu. Cílem práce je rozšířit možnosti využití běžného obráběcího stroje, tak aby se přiblížil k možnostem profesionálních zařízení. V rámci vývoje lze řešit například:
- úpravy mechanické konstrukce stroje s cílem zlepšení technických parametrů (pevnost, tuhost, vůle)
- návrh, výroba a testování přípravků a doplňků pro zlepšení možností práce se strojem (odměřování, upínání, seřizování)
Každé z těchto řešení je kombinací mechanické konstrukce a podpůrné elektroniky. Od řešitele se očekává, že se zaměří na některá z výše popsaných vylepšení. Bez ohledu na vybrané vylepšení budou náklady přibližně stejné.
Poslední editace proběhla 2017-03-31 23:39:53 uživatelem Jarek Páral